Building a Radio controlled car
Updates:
Session 2 (22.10.22): We need to fix:
- NN:
- Run new architecture
- Start with the dataloader
- Sensing:
- Run in Jetson and get 20 FPS and up to 100ms latency
- Control
- Moving controller to raspberry + ps4 controller
Session 1 (15.10.22): Mainly defining who will be doing what
Note 0: Thanks to Kopernikus Automotive for sponsoring this project and the Meetup.
For more updates please check the discord channel
General Description
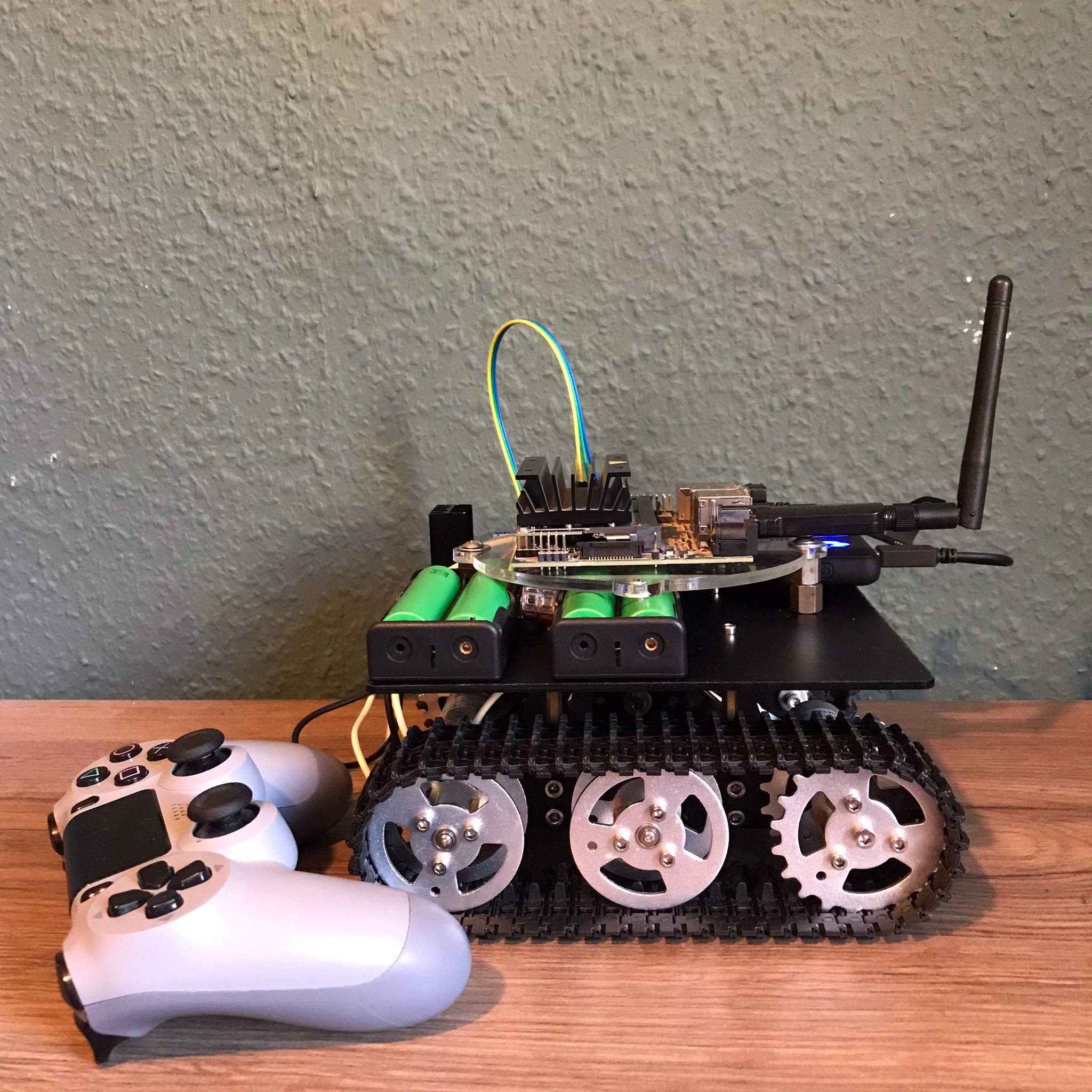
BTW the picture above is the car we’re building
We’re thinking about joining the race for autonomous driving + robots meetup berlin and for that we need to build an RC car. Everyone in the team has something they want to experiment with, for example, a general end-to-end driving approach capable of working with on-board and off-board cameras. Everyone is welcome, we always need more hands.
If you’re interested in helping us, please join the event! We have some parts of the car already built, but we still need to finish that + all the perception parts.
If you’re interested, let us know! We welcome everyone who is interested in learning and/or helping us. We will be meeting usually in Berlin but sometimes online depending on the topic.
We will be posting updates of progress here.